
Planning cities to adapt to the future is challenging due to complex interactions between mobility, infrastructure, and land use. This challenge is exacerbated by the need to study future uncertainties such as ever-shifting demographics and industrial landscape, increased environmental and climatic changes, disruptive and unpredictable technological development, and unprecedented events such as the COVID-19 pandemic.
To make good plans in such uncertain environments, cities need to rethink their planning approaches and toolsets. In particular, as infrastructure requires considerable financial resources and last for a long time, urban plans need to be carefully evaluated. Additionally, as infrastructure has widespread impacts on society, the economy and the environment, infrastructure planning is usually political, with numerous stakeholders with competing interests being part of the decision-making process.
The adaptive planning paradigm proposes to navigate such uncertain conditions by learning how uncertainties unfold and allowing continuous adaptation over time. To apply adaptive planning, computational models are often used to anticipate a wide range of potential future scenarios. Then, plans are developed that commit to short-term interventions (that work well in any scenario) and monitor the system to guide future interventions. As urban systems are complex, data-hungry and detailed models are often used to represent them. However, numerous simulations under a wide range of future scenarios are usually not feasible because these models take a long time to run.
An Example of Identifying Model-based Adaptive Urban Plans
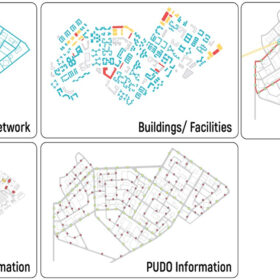
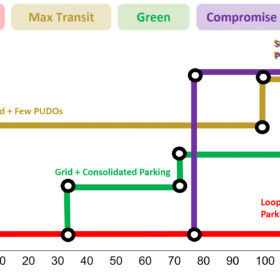
To tackle such challenges, the module Adaptive Mobility, Infrastructure and Land Use, at the Future Cities Laboratory Global, conducted a proof of concept study on the use of complex agent-based models (MATSim) for adaptive planning in a Singaporean neighbourhood. We were able to calibrate a fast approximate model with MATSim to allow the simulation of many future scenarios and facilitate the search for optimal adaptive plans. We identified adaptive urban plans, i.e., the optimal sequencing, timing, and grouping of urban interventions to achieve three competing objectives: reducing carbon emissions, increasing public transport use and minimising capital investments. Future scenarios were developed for three main uncertainties over time: changes in travel demand, development of autonomous vehicles and user’s preferences towards shared autonomous vehicles.
Plans that are optimal for individual objectives provide insight into the sequencing and timing of interventions when there is a clear single objective. However, as these high-stake decisions often require consensus building among stakeholders, the identification of compromise plans (the ones that balance multiple objectives) might be beneficial to explore alternatives that are adequate for multiple perspectives.

Orlando Roman is a doctoral researcher at the Singapore-ETH Centre and the Infrastructure Management Group of the Institute of Construction and Infrastructure Management, ETH Zürich.

Dr. Qiming Ye is a research associate and module coordinator at the Singapore-ETH Centre and the Infrastructure Management Group.

Prof. Dr. Bryan T. Adey is the Head of the Infrastructure Management Group.
Find out more


Flexible Office Space for the Age of Distributed Work
» Newsletter-articles
