Michael Nold, Francesco Corman
2024
Full text
The reduction of energy consumption is an increasingly important topic of the railway system. Energy-efficient train control (EETC) is one solution, which refers to mathematically computing when to accelerate, which cruising speed to hold, how long one should coast over a suitable space, and when to brake.
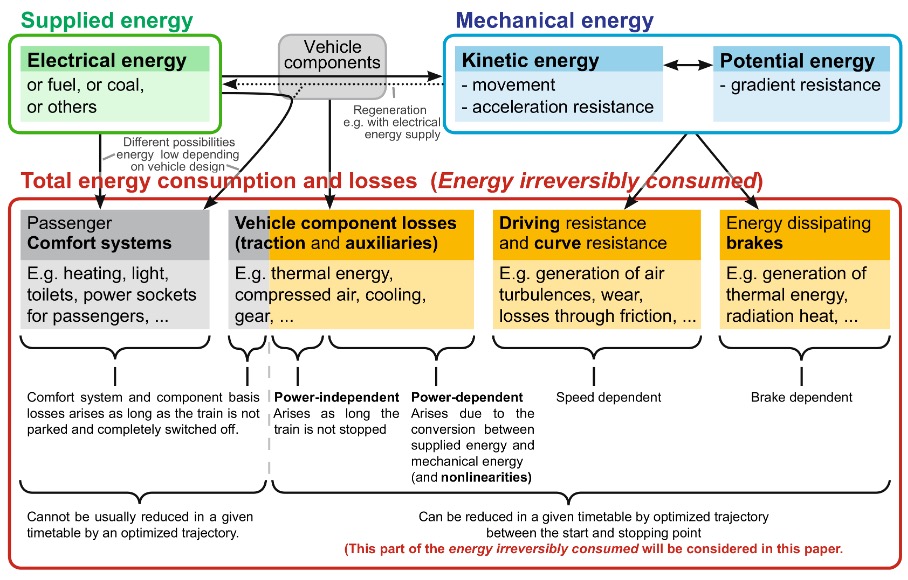
Most approaches in literature and industry greatly simplify a lot of nonlinear effects, such that they ignore mostly the losses due to energy conversion in traction components and auxiliaries. To fill this research gap, a series of increasingly detailed nonlinear losses is described and modelled. We categorize an increasing detail in this representation as four levels. We study the impact of those levels of detail on the energy optimal speed trajectory. To do this, a standard approach based on dynamic programming is used, given constraints on total travel time. This evaluation of multiple test cases highlights the influence of the dynamic losses and the power consumption of auxiliary components on railway trajectories, also compared to multiple benchmarks. The results show how the losses can make up 50% of the total energy consumption for an exemplary trip. Ignoring them would though result in consistent but limited errors in the optimal trajectory. Overall, more complex trajectories can result in less energy consumption when including the complexity of nonlinear losses than when a simpler model is considered. Those effects are stronger when the trajectory includes many acceleration and braking phases.
Leggi anche